Met een digitaal modelautosysteem worden de opdrachten naar de modelauto’s gestuurd. Ieder modelauto heeft daarvoor een decoder en ontvangstspoel om het signaal te krijgen. Het digitaal modelautosysteem genereert het signaal dat via het zendsysteem naar de auto’s wordt gestuurd. De positiemeldingen worden ingelezen zodat het de verplaatsingen van de auto’s registreert. Een digitaal modelautosysteem is pas compleet met het aansturen van “wissels” voor het afslaan van auto’s het schakelen van verkeerslichten en eventueel andere straatverlichting.
Schematisch ziet de opbouw er als volgt uit:
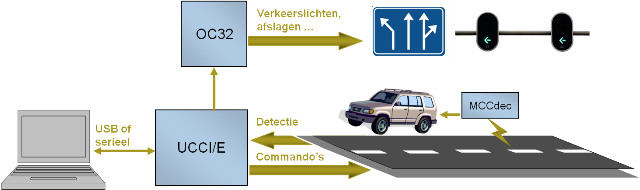
De UCCI is de centrale in een digitaal modelautosysteem die zorgt voor communicatie met de PC, aansturing van de zendlussen in het wegdek, het inlezen van positiesensoren en het aansturen van OC32’s. Met de OC32 kunnen “wissels”, verkeerslichten en diverse andere accessoires worden aangestuurd. De capaciteit van één UCCI is voldoende voor een middelgrote modelbaan. Hiermee kan circa 40 meter weglengte en maximaal 64 auto’s (gelijktijdig) worden aangestuurd.
Een andere mogelijkheid is het opnemen van UCCI in een Dinamo of Dinamo Plug&Play systeem. In één systeem kunnen dan maximaal 16 UCCI’s worden opgenomen waarmee ongeveer 640 meter weglengte kan worden aangestuurd. Dit is de oplossing wanneer een enkele UCCI centrale te beperkt is voor de omvang van het stratenplan of als met één systeem zowel treinen als auto’s worden bestuurd. In een Dinamo systeem wordt de verbinding met de computer via een RM-C gemaakt. De RM-C geeft daarbij een bus waarop de diverse modules waaronder UCCI en OC32 kunnen worden aangesloten.
Meer informatie over de diverse onderdelen is hier te vinden.